Зачем исследовать город
Комплексные исследования дают представление о суточных и сезонных паттернах использования городского пространства.Быстрый и масштабный срез данных выявляет проблемные участки УДС, позволяет оценить экологическую ситуацию и уровень благоустроенности территории.
Передовая технология
Современное программное обеспечение и оборудования, разработанного специально для исследовательских задач позволяет быстро и качественно получить оцифрованные данные о движении транспортных средств и пешеходов в геоинформационном формате.
Методология
Стартовым этапом сбора данных об уличном трафике является видеосъемка узловых точек улицы. Это серия видеороликов длительностью 15 минут, которая записывается утром, днем и вечером. В зависимости от условий, съемка проводится с земли или с воздуха. Аэросъемка позволяет единоразово захватить всю площадь исследуемого участка и прилегающие территории. Высота съемки (от 50 до 250 м) обусловлена размером снимаемого участка. Городская среда накладывает ограничения на проведение аэросъемки — высокая плотность застройки, наличие препятствующих объектов, близость к режимным объектам — и в случаях, когда аэросъемка будет неэффективна, видеоматериалы собираются при помощи наземных панорамных камер.
Детекция движущихся объектов
В процессе детекции, происходит распознавание объектов — пешеходов и транспортных средств — при помощи нейронной сети. При этом транспортные средства классифицируются по категориям: «Легковой автомобиль», «Грузовой транспорт», «Общественный транспорт».
В результате на каждом кадре исходного видео отмечается положение распознанных и классифицированных объектов. Нейронной сетью распознаются все объекты в кадре, в том числе припаркованные тренспортные средства и стоящие на месте пешеходы.
В отличие от статичной панорамной камеры, квадрокоптер в воздухе подвержен порывам ветра. Для того, чтобы из-за движения камеры треки на видео не сдвинулись при последующей геопривязке, видео, снятые с воздуха требуют стабилизации, которая происходит в самом начале обработки.
Трекинг
Это алгоритм вычисления траекторий движения объектов, в пределах видимости камеры. Искусственный интеллект обрабатывает кадр за кадром, предсказывает, в каких зонах объект окажется на следующем кадре и определяет скорость его движения. В результате рождаются цифровые траектории движения.
На этапе трекинга нейронная сеть отбрасывает статичные объекты и слишком короткие траектории, а также соединяет линии, которые были прерваны из-за загораживающих обзор объектов (деревья, фонари, крыши зданий).
Ремаппинг
Далее полученные цифровые следы необходимо отобразить на карте. Ремаппинг — это процесс проецирования. Траектории транспортных средств и пешеходов привязываются к мировым координатам и становятся геоинформационными данными. В случае с наземной съемкой алгоритм перепроецирует данные из локальной системы координат панорамной камеры в плоскость, ориентируясь на систему опорных точки.
Кластеризация
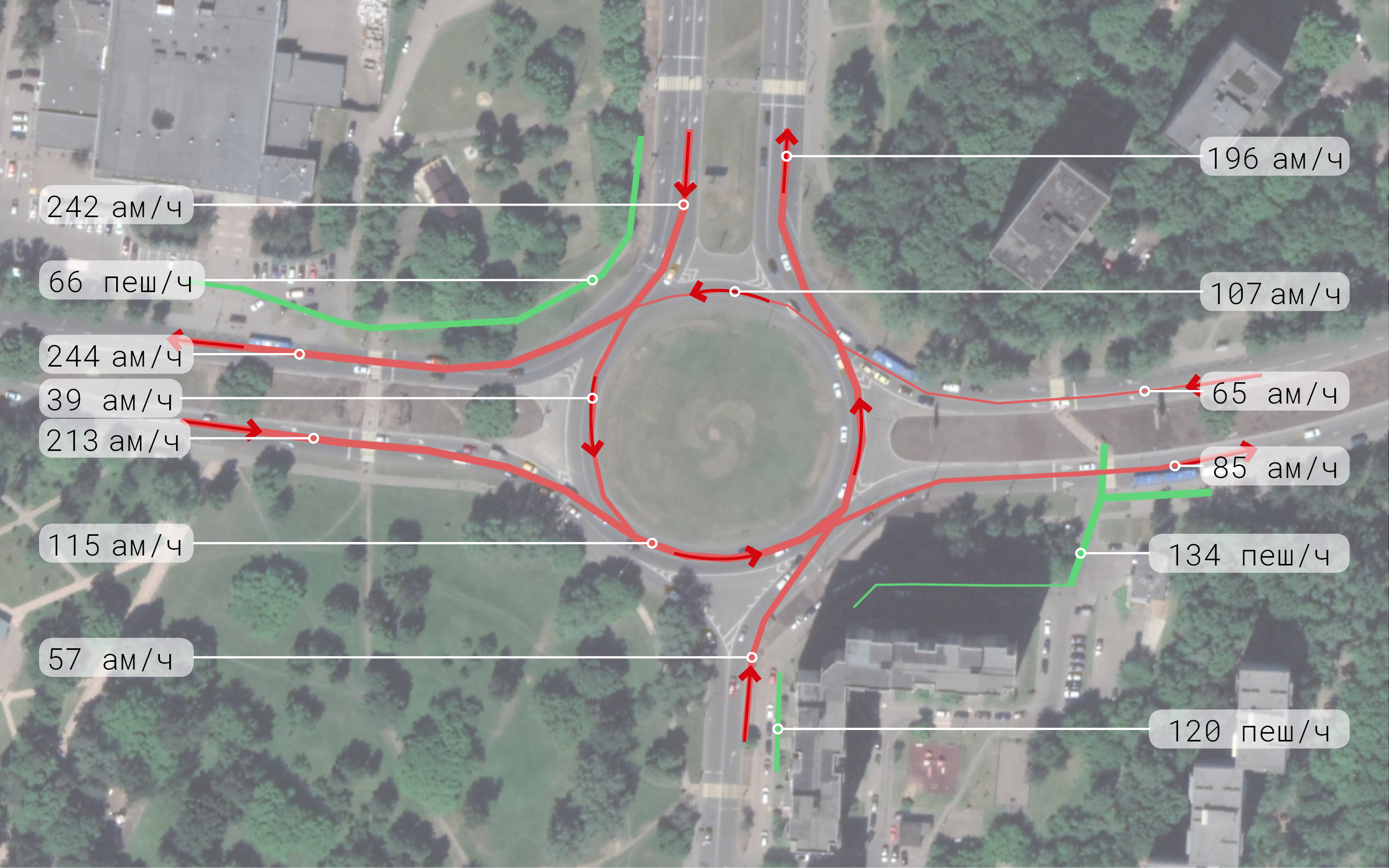
Завершающий этап обработки данных — кластеризация траекторий движения объектов. Этот процесс обобщает и систематизирует полученную информацию о перемещении объектов. Кластеризованные траектории представляют собой схему перекрестка, а также характер перемещения по нему участников дорожного движения. Треки, полученные на этом этапе также привязаны к мировым координатам.

Полученные сведения становятся исходными данными для проектирования улиц и создания общественных пространств.
Данные дают возможность увидеть:
- дорожно-транспортная ситуация;
- качество велопешеходных коммуникаций;
- инвентаризация элементов благоустройства;
- комплексный экомониторинг.
Область применения данных:
- проектирование УДС;
- усовершенствование режима работы светофоров;
- комплексное благоустройство городской территории;
- отслеживание изменений после реализации программ по улучшению городской среды.
ГОРОДА ИССЛЕДОВАНИЯ
В ряде городов России автоматизированный метод подсчета транспортных и пешеходных потоков успешно применялся как часть комплексного исследования среды.
2017
Саратов
Калининград
Свободный
Санкт-Петербург
Тверь
Ярославль
2018 — 2019
Москва
Первоуральск
Глазов
Севастополь